This term in Digital technologies, 7B was assigned with the task of creating a Driving Base using Lego Spike to win a race to the finish line. Out of multiple strategies such as using force to knockout others or trying to use code to increase speed, one strategy was different from the rest and it won the race. Here is how.
My first strategy was to remove unnecessary parts from the driving base, so it didn’t have to carry much weight. However, this only improved the speed by a fraction and most likely wouldn’t win the race. So along with weight reduction, I used gear ratios to further improve the speed.
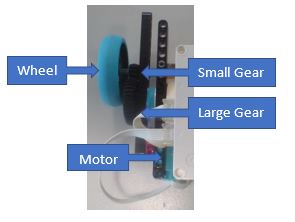
I put a 36-tooth gear on the motor spinning a 12-tooth gear attached to the wheel. This created a 12:36 or simplified 1:3 gear ratio causing the wheel to triple in speed. For example, a small gear with 10 teeth and a large gear with 20 teeth would make a gear ratio of 1:2 which when the large gear is turned, the small gear will double in speed.
These engineering innovations resulted in the Driving Base reaching the finish line while the rest only just reached halfway. Multiple Driving Bases tried to use force to knockout the other robots and stop them from winning, but no one could beat my Driving Base!
We all have the hands to slap a mosquito, but if you don’t have the speed, you’ll just end up with an itchy lump on your arm.
Evert Eykman, 7B
{kind=link}
{kind=link}
{kind=link}